Linear and Heuristic-based Missile Guidance
As a final project for my course on Avionics, Guidance, and Navigation of aerospace vehicles, I was tasked with designing proportional and heuristic controllers for target tracking. Some examples of the results can be found below.
The linear controllers used a proportional feedback loop based on the target close rate and the horizon angle rate of change.
~Target Close Rate:~ The rate of change of the distance between the pursuer and the target
~Horizon Angle Rate of Change:~ The change in the angle between the pursuer and the target, measured to some fixed horizon point
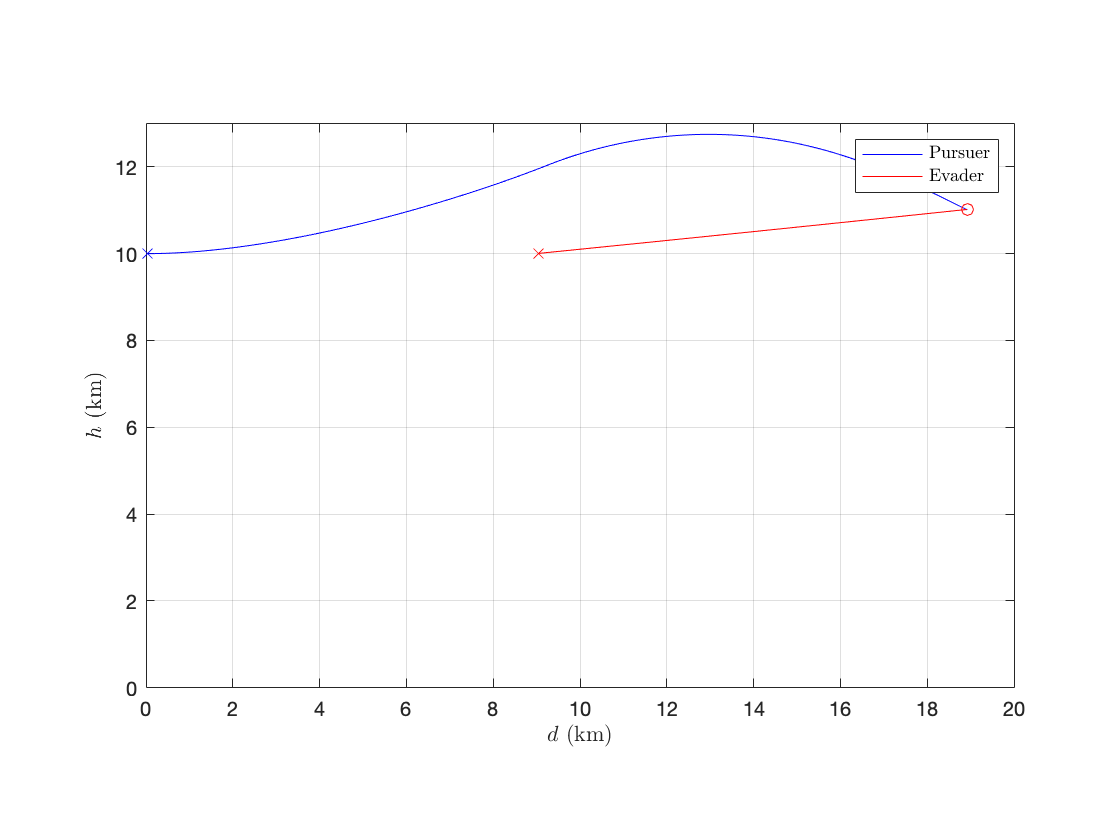
The linear controllers used a proportional multiplier of these two values in order to track our target. Our target for these experiments is a simplified model of an F-16 with constant thrust, and our pursuer is an AMRAAM Sidewinder missile with stepped thrust values.
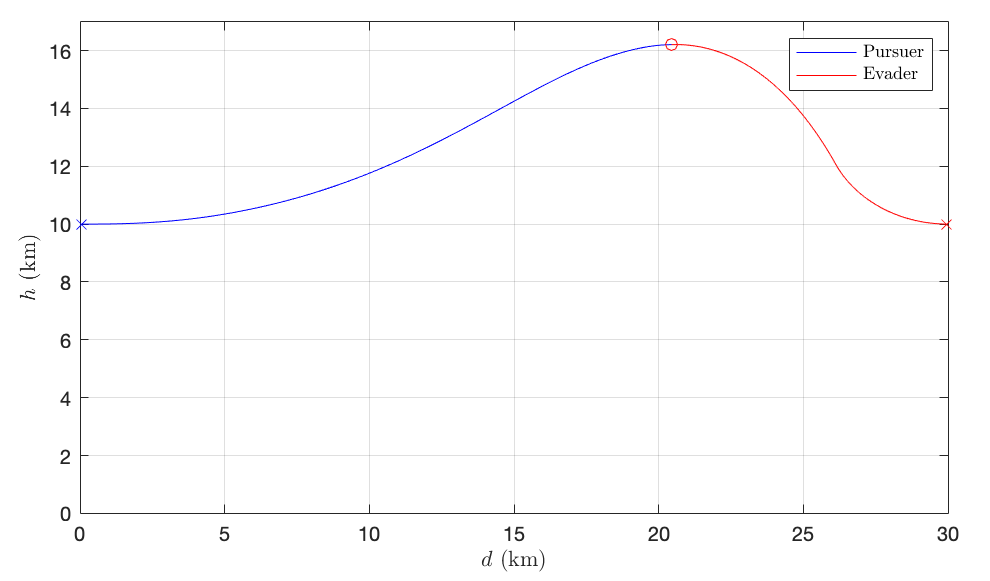
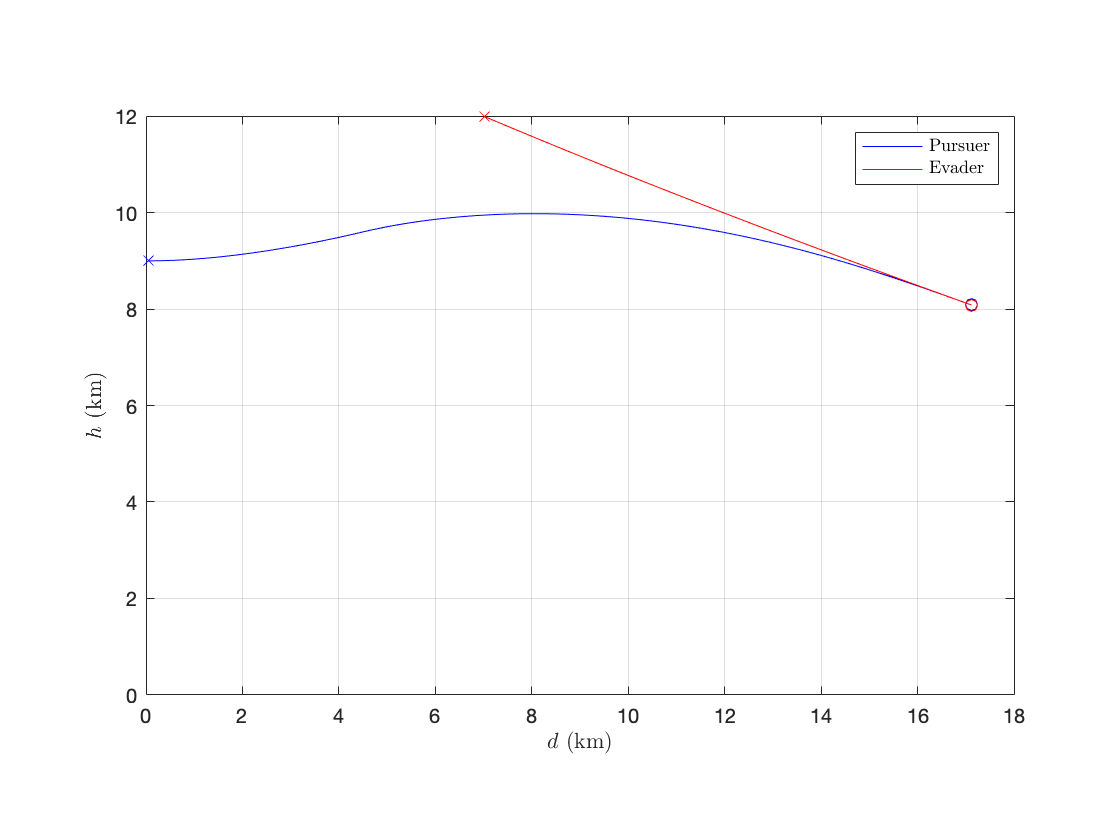
A heuristic-based system was also required to proxy in-the-loop control actions. I chose a “Loft and Glide” heuristic that allows the pursuers limited thrust profile to be boosted by gravity once the thrust is reduced or cuts off. The heuristic is shown below:
- If the height of the target is greater than that of the pursuer, perform a 1.5g turn opposite the force of gravity until the height of the pursuer is 125% that of the target or the target is within 5km
- Activate a “pursuit” trigger that cannot be turned off
- Once the pursuit trigger is activated, perform proportional guidance based on the Target Close Rate and the Horizon Angle Rate of Change.
This heursitic allowed for 70% hits, which outperformed the 40% success rate of proportional navigation. Two examples of this heuristic are shown below.